DYNAMICS R4 применяется для решения широкого спектра практических задач многовальной линейной и нелинейной роторной динамики. Объекты исследования — газотурбинные двигатели, турбонасосные агрегаты, силовые и энергетические установки, коробки агрегатов и многие другие. Используется на различных этапах проектирования, доводки и эксплуатации конструкций.
Описание программной системы DYNAMICS R4
Общие характеристики
- Линейная и нелинейная динамика роторных систем.
- Большая библиотека типовых элементов для моделирования сложных конфигураций роторных систем.
- Высокая скорость расчетов.
- Адаптивные методы численного интегрирования.
- Многообразие представления результата.
- Возможность создания базы данных материалов.
- Возможность создания пользователем новых нелинейных элементов на базе имеющихся у него алгоритмов и математических моделей.
- Формируемые пользователем вид и содержание протоколов.
- Развитая информационная система — функция помощи, сообщения об ошибках, предупреждения.
- Связь с конечно-элементными системами.
- Более 60 примеров использования программы в анализе моделей.
- Мультиязычный интерфейс.
Функциональные особенности
- Расчет многовальных роторных систем.
- Неограниченное количество роторов и корпусов.
- Пространственное расположение подсистем — соосные, несоосные, перекрещивающиеся подсистемы.
- Совместные изгибные, продольные и крутильные колебания роторов и корпусов.
- Учет анизотропных свойств в различных направлениях.
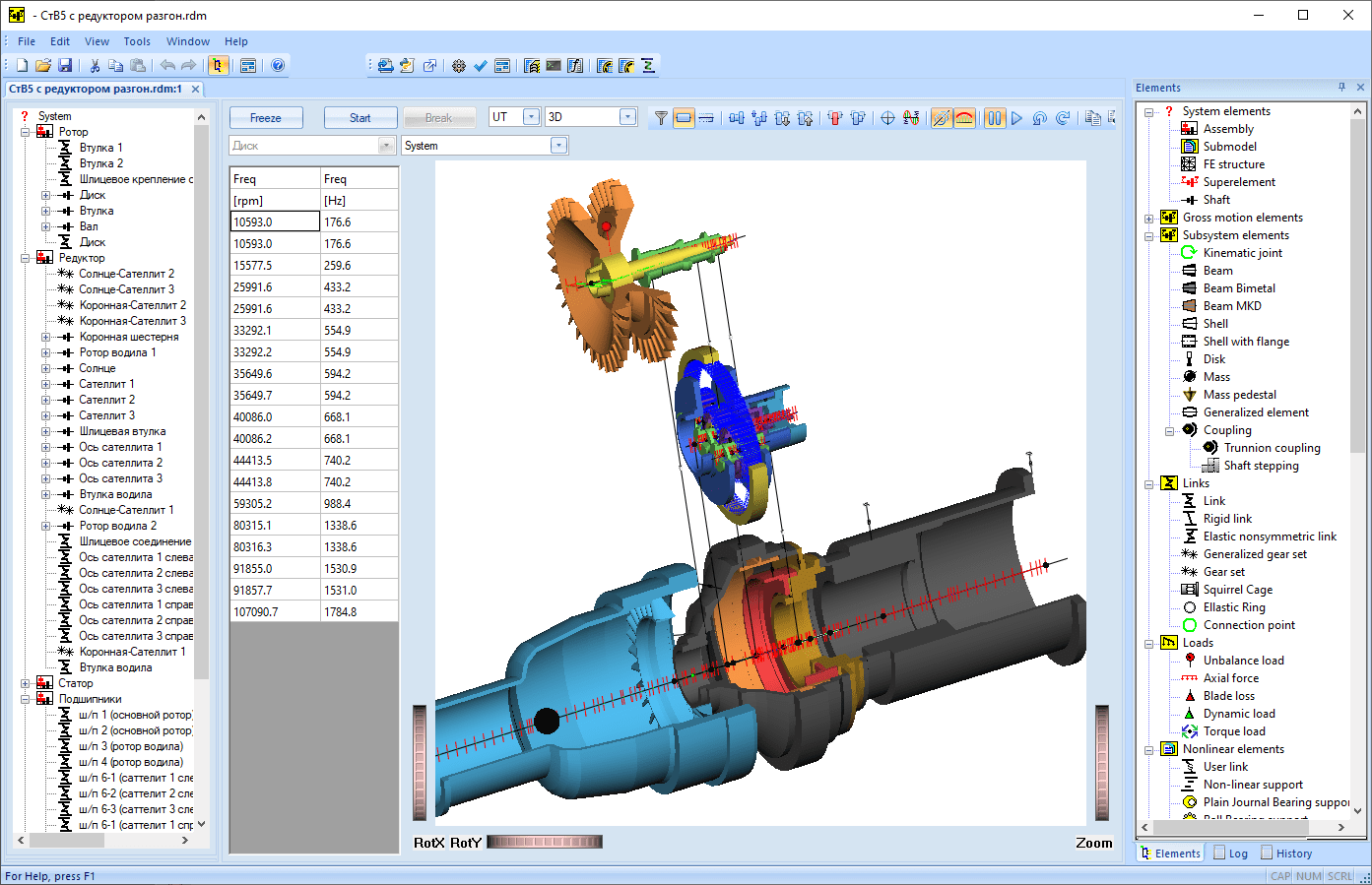
- Возможность расчета роторных систем с зубчатыми передачами.
- Учет скольжения роторов.
- Учет внешнего и внутреннего демпфирования.
- Учет осевого статического нагружения.
- Параметрический анализ — любой закон изменения параметров модели и нагружения в процессе расчетов.
- Различные виды нестационарного нагружения — импульсная сила, обрыв лопатки, гармоническое и полигармоническое возбуждение, произвольно заданное нагружение.
- Расчеты с учетом аэродинамических сил в осевых и центробежных компрессорах.
- Расчеты систем с кинематическим и сейсмическим возбуждением.
Основные задачи линейного анализа динамических систем роторов
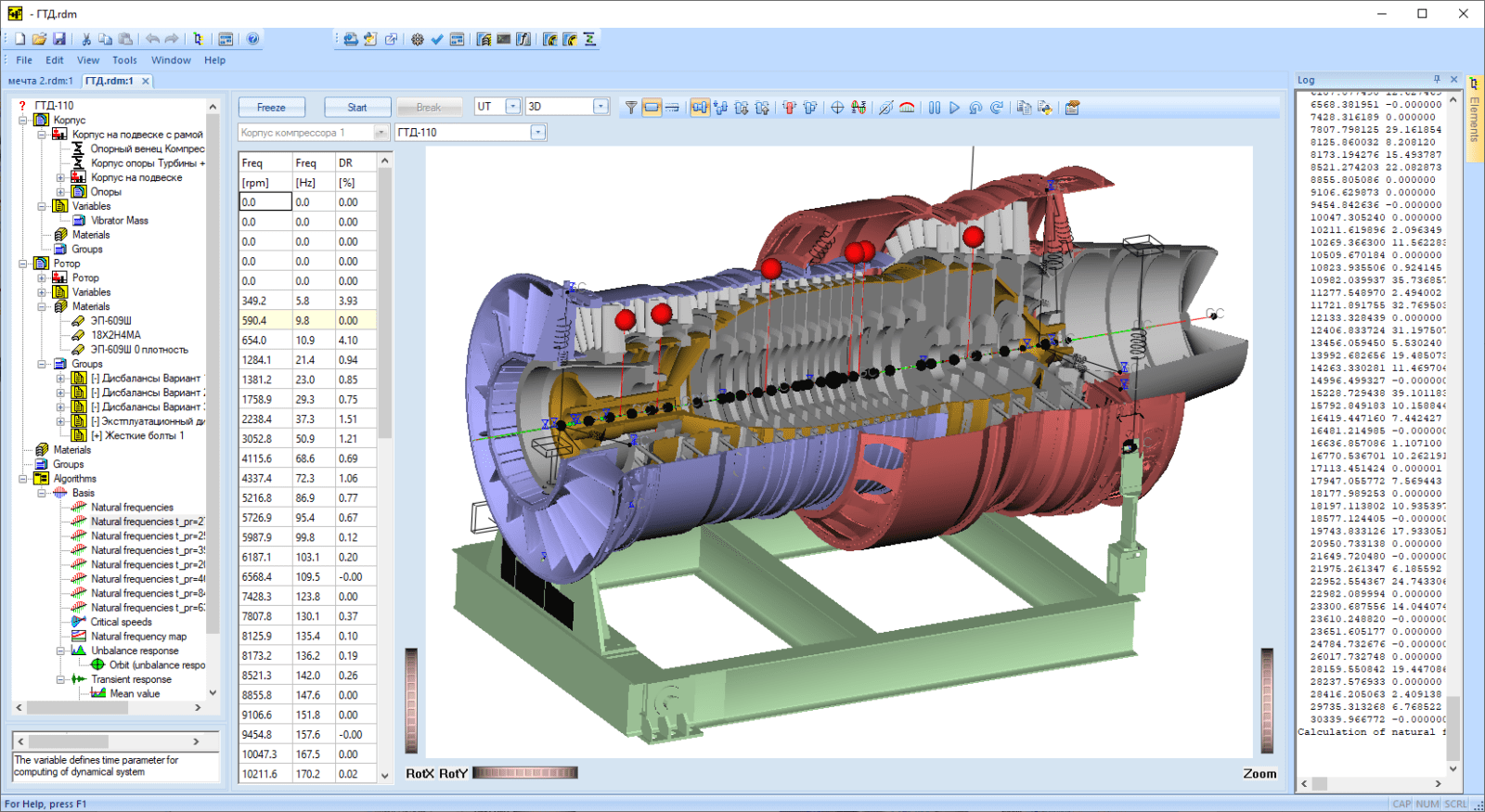
- Демпфированные собственные колебания вращающихся роторов.
- Критические частоты вращения роторов.
- Частотные диаграммы.
- Карты критических частот.
- Распределение кинетической и потенциальной энергии колебаний по элементам конструкции.
- Карта и границы устойчивости.
- Дисбалансное синхронное и несинхронное поведение.
- Расчет статических прогибов от веса и приложенных нагрузок.
Основные задачи нелинейного анализа динамических систем роторов
- Расчет системы с зазорами — полное и частичное касание, потеря устойчивости.
- Расчет с подшипниками скольжения различных типов.
- Расчет с демпферными устройствами различных типов.
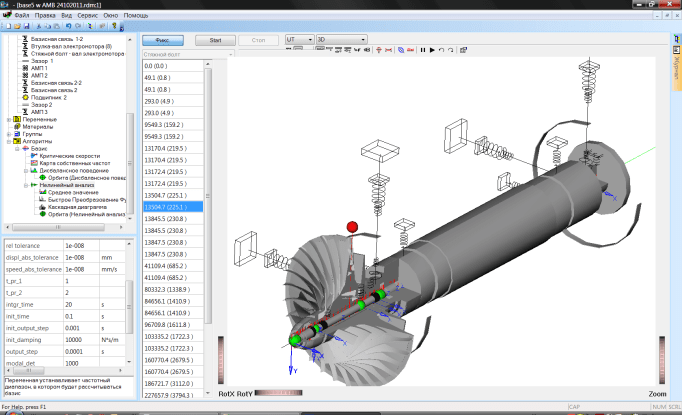
- Расчет с нелинейными подшипниками качения.
Интерфейс пользователя
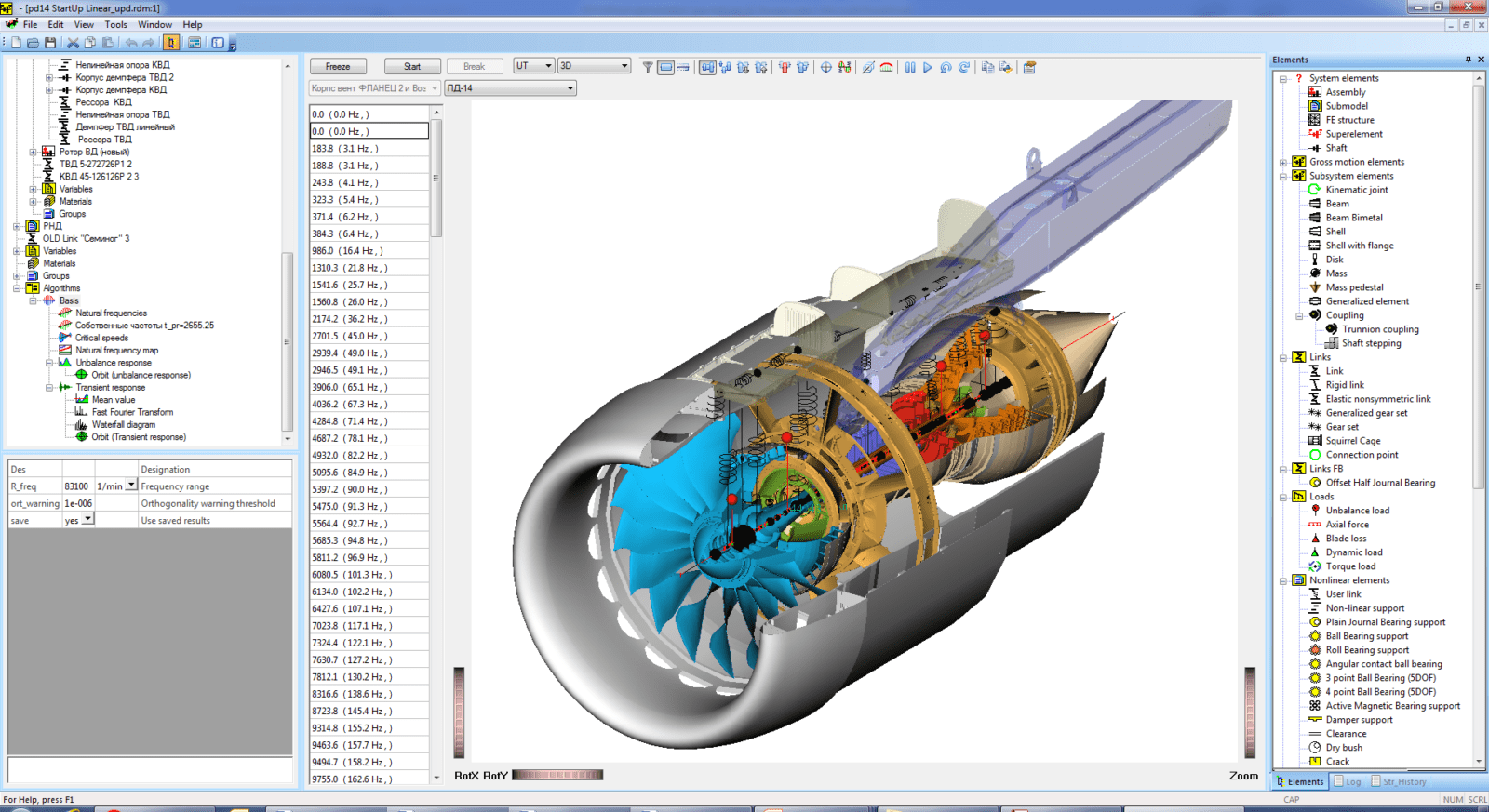
- 2D и 3D-представление роторной модели.
- Возможность создания в рамках одного проекта групп элементов, взаимозаменяемых при вариантных исследованиях.
- Дискретная и непрерывная анимация.
- Различные представления результатов моделирования — амплитудно-частотные характеристики, временные сигналы, орбиты движения после нестационарного анализа, вибрационные спектры, каскадные диаграммы, СКЗ, огибающие, размах.
- Вывод результатов в 2D и 3D-графиках.
- Различные параметры вывода — перемещения, фазы, скорости, ускорения, силы, моменты.
- В протоколах быстрое формирование любого набора исходных данных и результатов расчета для их вывода и формирования отчетов.