Задача динамики для роторов на газодинамических подшипниках нелинейная — решается в линеаризованной постановке, учитывающей изменение жесткостных и демпфирующих характеристик газового подшипника по режимам. Может быть рассмотрена и в нестационарной постановке с определением спектрального состава вибраций. Разделяется на следующий круг основных подзадач:
- Выбор шаблона газодинамического подшипника.
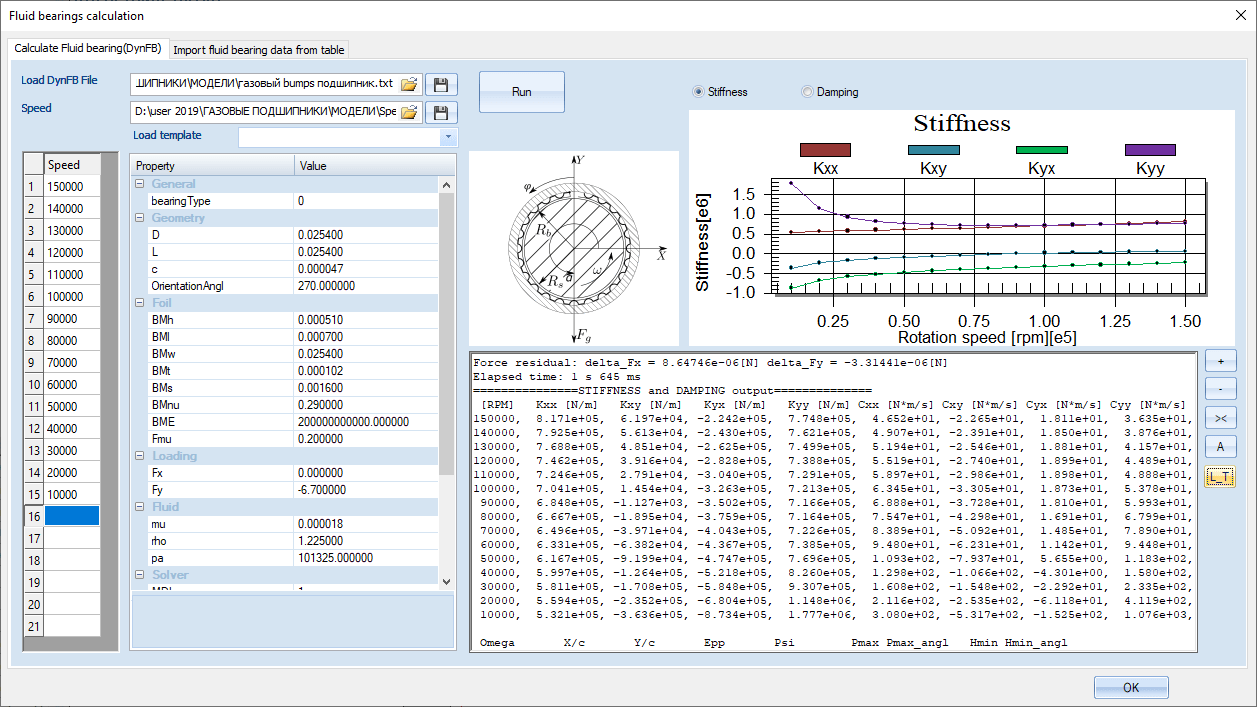
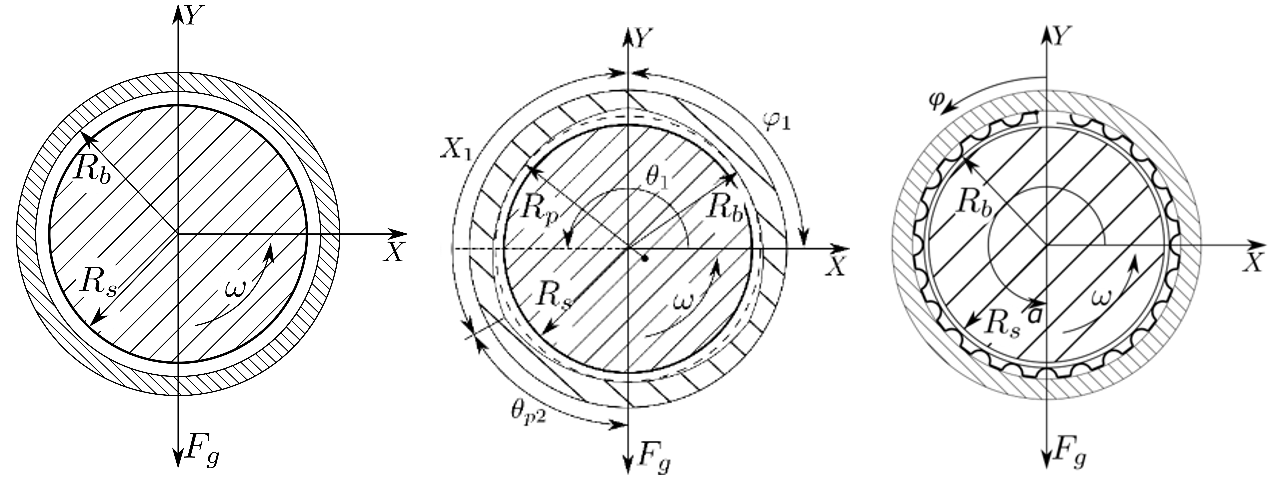
- Формирование геометрии подшипника и определение исходных данных.
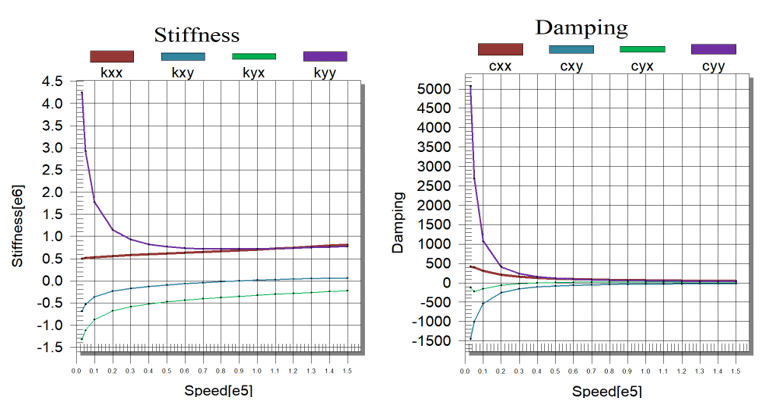
- Расчеты статических и динамических характеристик подшипника.
- Передача рассчитанных коэффициентов жесткости и демпфирования в модель ротора.
- Расчет собственных частот динамической системы.
- Определение критических частот вращения.
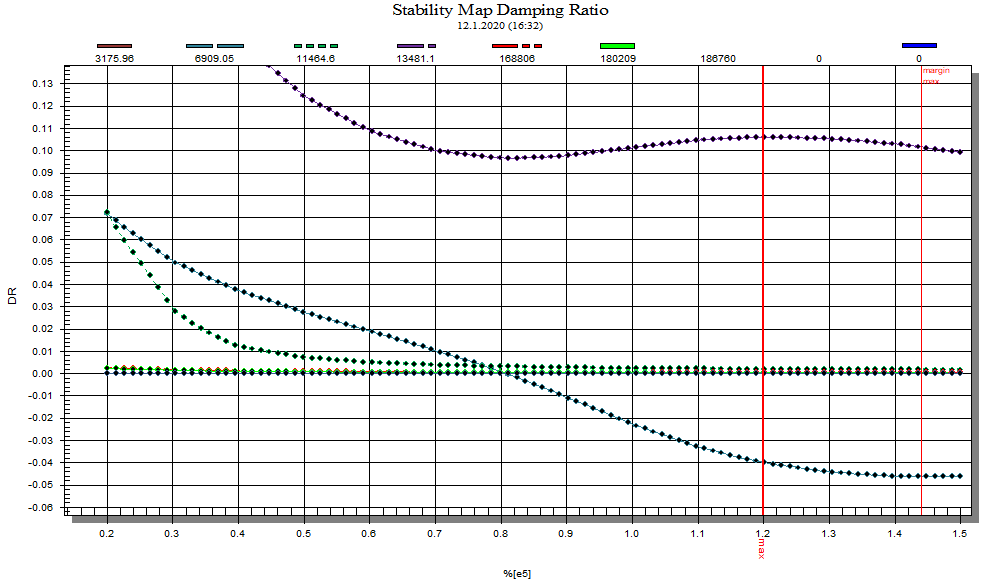
- Определение границ устойчивости.
- Расчет вынужденных колебаний.
Задача расчета газодинамического подшипника скольжения разделяется на следующий круг подзадач:
- Расчет статического давления газа на стенки вала и лепестка;
- Расчет деформации лепестка с гофрированной подложкой под действием давления газа;
- Определение статического равновесия ротора в поле действия внешних статических сил, силы веса, при постоянной частоте вращения;
- Вычисление коэффициентов жесткости и демпфирования.
В программе DYNAMICS R4 технология проектирования газодинамических подшипников реализована в варианте непрерывного процесса, позволяющего многократно сократить время получения динамических характеристик роторной системы – от задания данных подшипника и получения жесткостных и демпфирующих характеристик газодинамического подшипника, в модуле [DynFB] до определения границ устойчивости ротора на выбранных подшипниках, критических частот вращения, амплитудно-частотных характеристик и других.