Общие представления
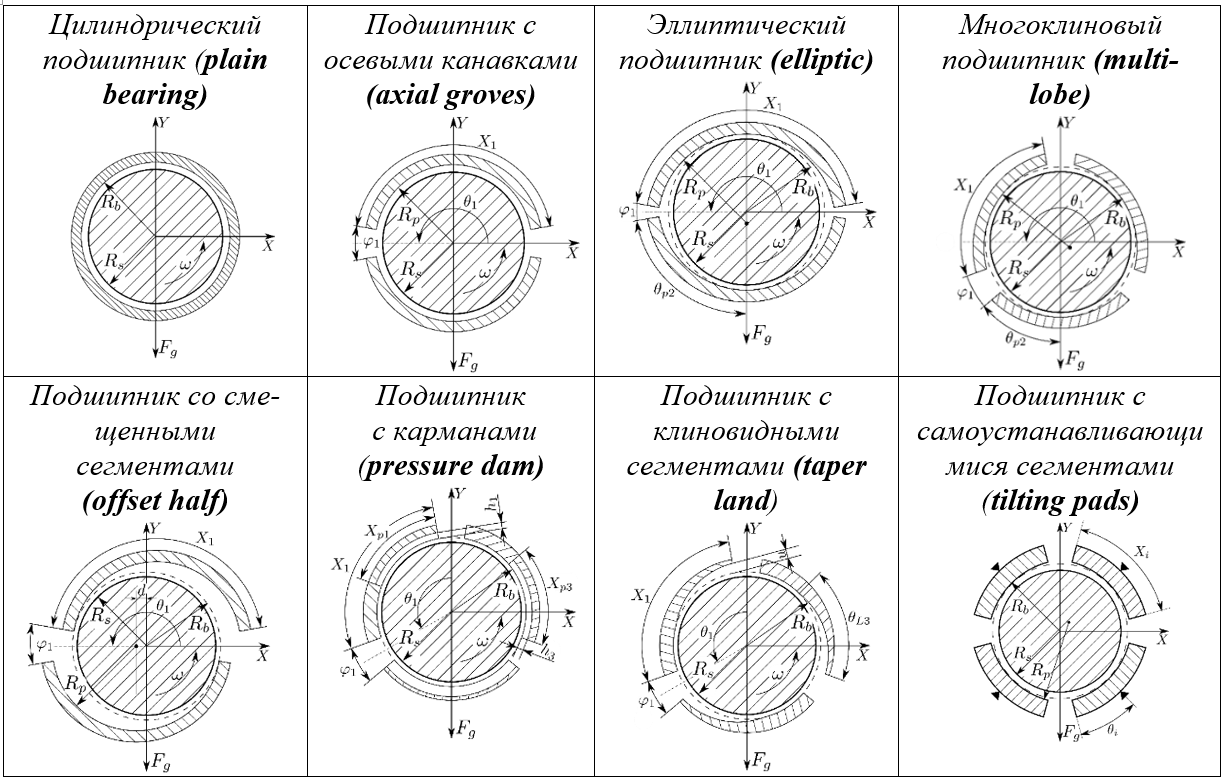
При проектировании ротора, опирающегося на подшипники скольжения и независимо от их конструкции в DYNAMICS R4 решается задача расчёта динамики роторной системы в целом, неотъемлемой частью которой является определение статических и динамических характеристик подшипников скольжения. В программной системе DYNAMICS R4 реализованы алгоритмы для следующих типов подшипников скольжения.
Проектирование подшипников
При проектировании подшипников определяются их статические характеристики, связанные со стационарным положением центра вала под действием внешних статических сил:
- Относительный эксцентриситет ротора;
- Положение и значение минимального зазора в плёнке;
- Значение максимального удельного давления в плёнке;
- Потери мощности на трение;
- Утечки масла из подшипника через торцы и ряд других;
Динамические характеристики подшипники дают возможность определить:
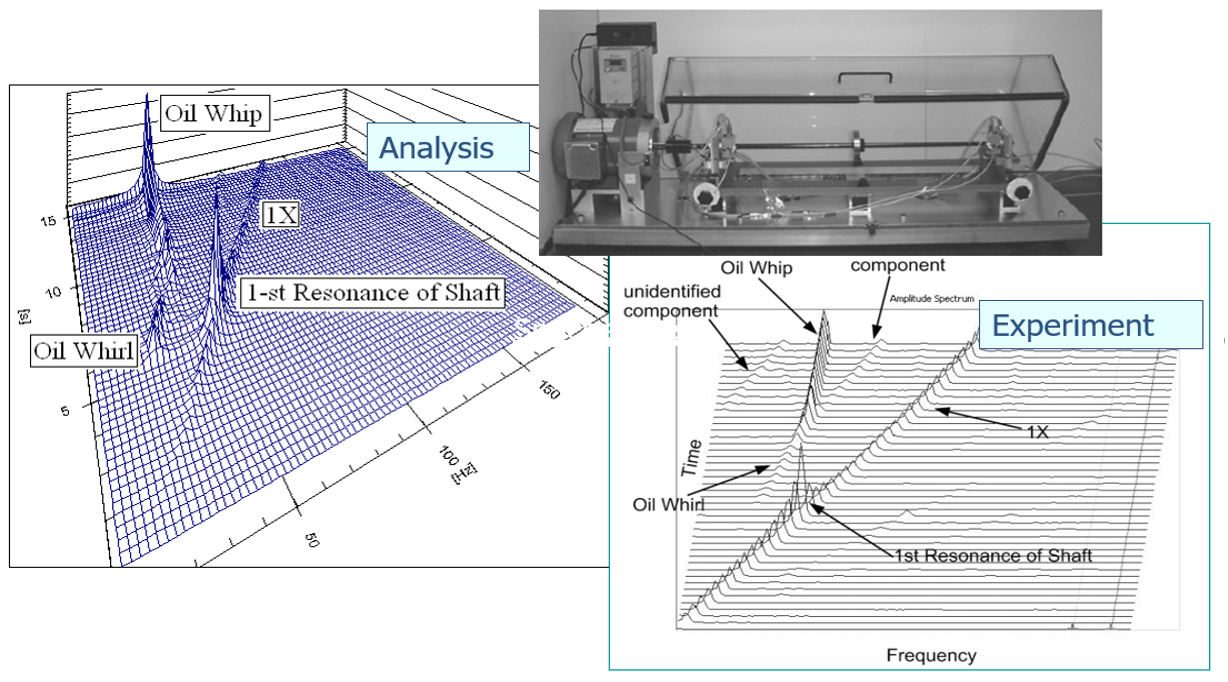
- Границу устойчивости ротора (момент возникновения автоколебаний, её частота и форма колебаний);
- Уровень вибраций и резонансное поведение ротора от остаточных дисбалансов в рабочем диапазоне.

Для расчета динамических характеристик подшипников скольжения в модуле [DynFB] программного комплекса DYNAMICS R4 реализован общий алгоритм расчёта, построенный на численном решении двухмерного уравнения Рейнольдса.

Уравнение Рейнольдса решается методом конечных разностей с граничными условиями, частично задаваемые пользователем, например, количество и положение осевых канавок, карманы и проточки в сегментах, меняющие геометрию рабочих поверхностей и т. д.
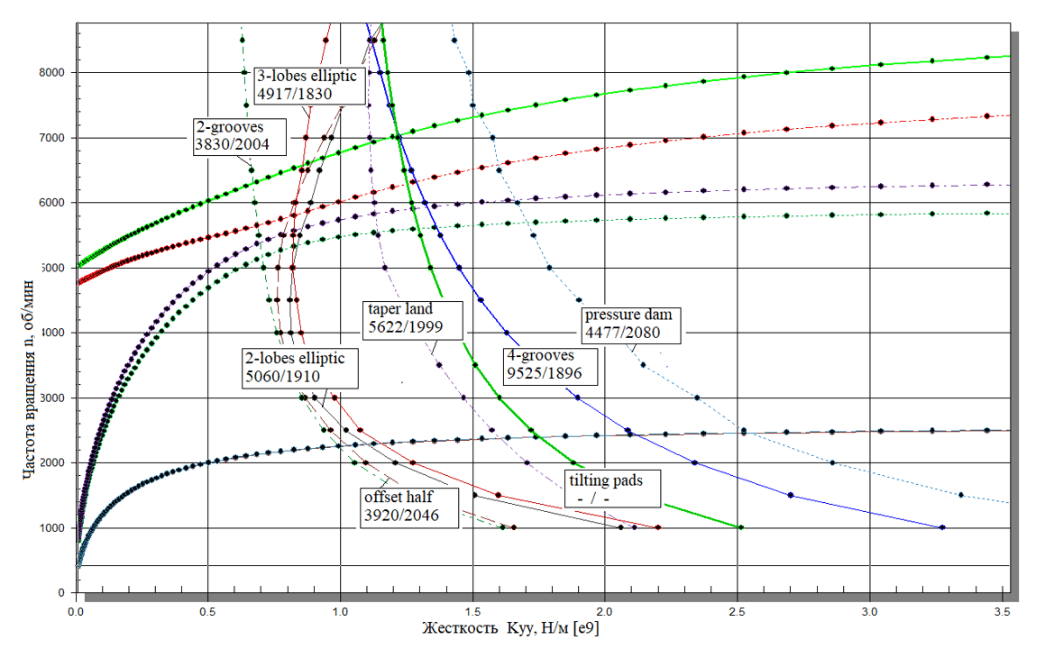
В процессе расчета подшипника для каждого значения скорости вращения определяются различные параметры, в том числе жесткостные и демпфирующие коэффициенты, определяющие динамику ротора, а также статические характеристики.
В общем случае подшипники скольжения являются нелинейными элементами роторной системы, но их динамические характеристики, коэффициенты жесткости и демпфирования, могут быть линеаризованы в рамках определённых условий – для малых отклонений цапфы вала от стационарного положения при его вращении.

Коэффициент жёсткости и демпфирования
Массив полученных коэффициентов жесткости и демпфирования автоматически передается в опорные узлы предварительно подготовленной модели ротора, т.е. формируется квазилинейная модель ротора. После этого модель ротора с подшипниками скольжения полностью готова к расчету динамических характеристик. И далее задача динамики роторной системы решается либо в стационарной постанове, либо в нестационарной.
Среди нелинейных элементов программный комплекс DYNAMICS R4 включает модуль нелинейного цилиндрического подшипника скольжения, построенный на аналитических решениях уравнения Рейнольдса.